
Sub-Nyquist Radar with Distorted Pulse Shape
Single-Input Multi-Output Sub-Nyquist Radar
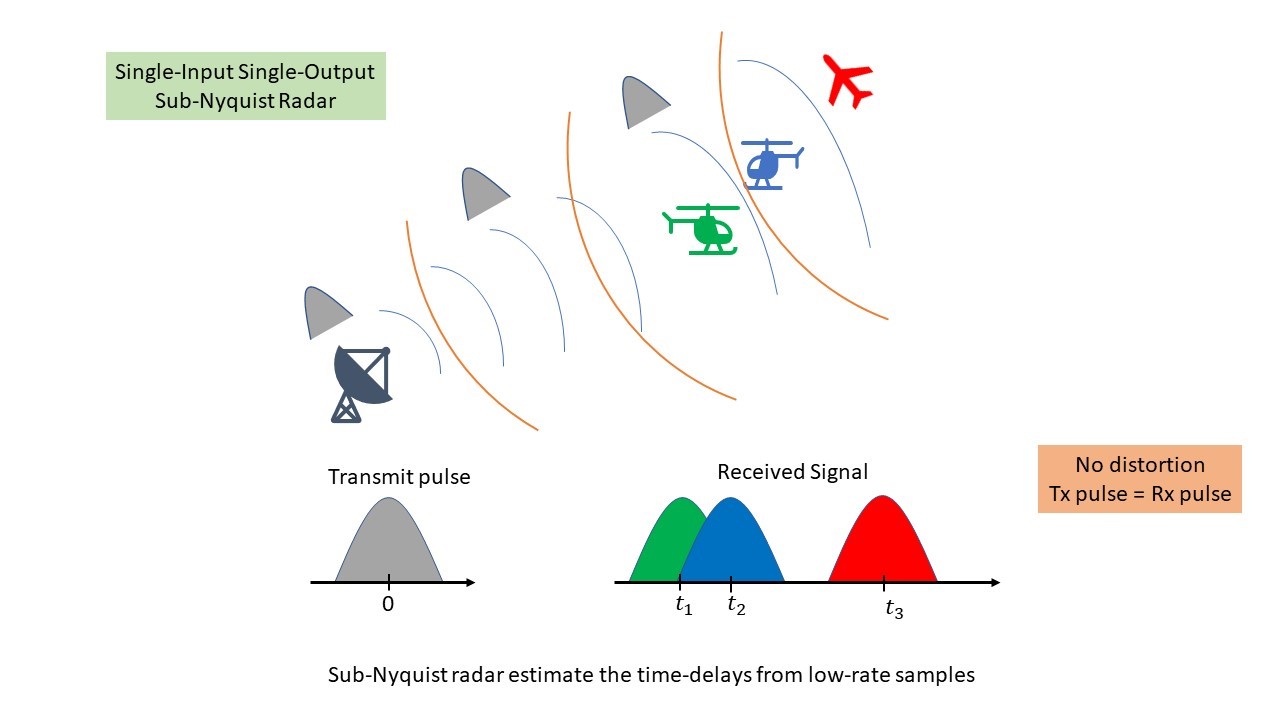
Radar is an imaging system where a radio frequency (RF) pulse is used to determine the range and velocity of the targets. A transmit (Tx) antenna emits an RF pulse that is reflected from the targets and the reflected echos are collected by a receive-antenna. In a sub-Nyquist radar, the received signal is modeled as a finite-rate-of-innovation signal by assuming that the Tx pulse is known. Specifically, the signal is parameterized by a set of amplitudes and time-delays that denotes the size and range of the targets. These parameters can be estimated from low-rate samples of the received signal with appropriate prefiltering. Reconstruction is achieved in the Fourier-domain by applying tools from high-resolution spectral estimation or compressive sensing. To estimate amplitudes and range (or time-delays) of L targets, 2L Fourier samples are necessary and sufficient.
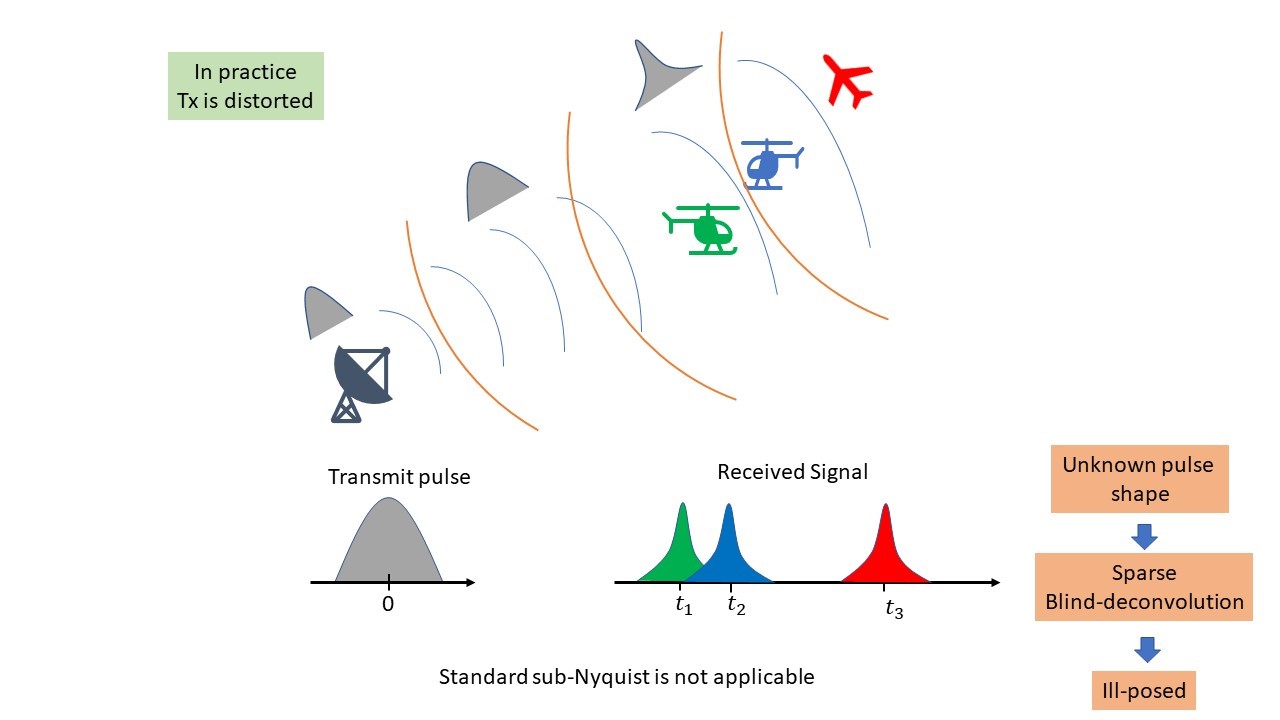
In practice, the Tx pulse is often distorted during transmission and reflection. With the distortion, the received signal can still be modeled as a linear combination of shifted-pulses but the pulse shape is unknown.

The problem of recovering target parameters with unknown pulse shape can be posed as the problem of blind-deconvolution. It is well known that blind-deconvolution problems are ill-posed without additional structural assumptions on the RF pulse or the target parameters. However, the problem is approachable if there are additional receivers. With multiple receivers, the problem is posed as a sparse multichannel blind-deconvolution (SMBD) where the received signals are given as a convolution of a common signal and sparse filters. In the radar context, the common signal is the distorted version of the Tx pulse and the filters denote the target locations and amplitudes with respect to each Rx antenna.
Demo
In this demo, we build a hardware prototype to validate our theoretical results. The prototype considers one transmitter and two receivers. We show that the range and amplitude of the targets can be estimated from samples measured at 10 times lower than the Nyquist rate without knowledge of the pulse shape. The results are comparable to a standard sub-Nyquist radar with a known pulse.
Hardware Description
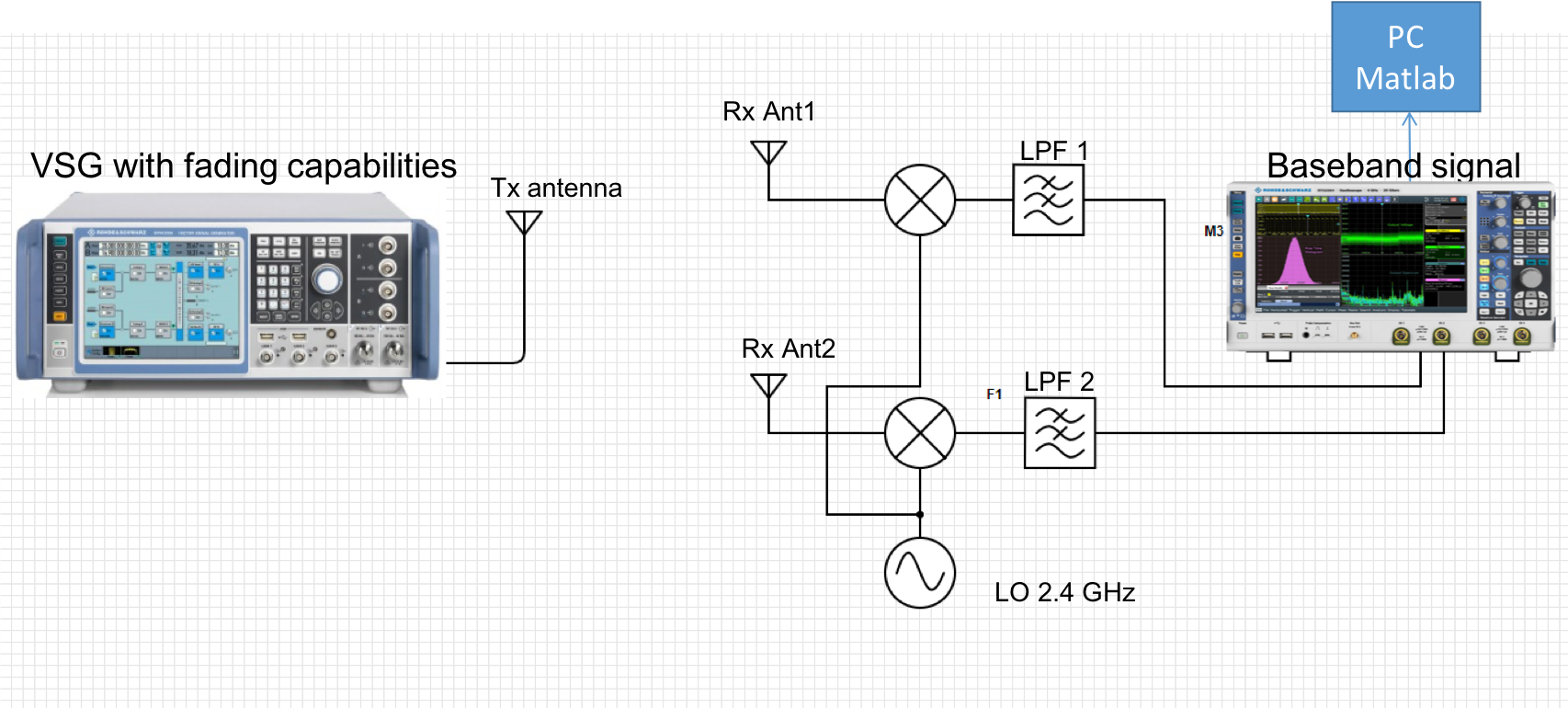
The hardware consists of a baseband transmit (Tx) signal generator, a vector signal generator (VSG) that acts as a target simulator, two receiver (Rx) channels consisting of down-converters and lowpass filters (LPFs), an analog to digital conversion (ADC) unit, and a PC controller. The antennas in Fig.~\ref{fig:hw} are depicted for illustration of the concept. In the hardware, all the signal transmissions are through cables. In the proposed prototype, an R&S RTO Oscilloscope is used as both Tx signal generator and Rx ADC unit. The Tx pulse is generated with a carrier frequency of 2.4 GHz and a bandwidth of 1 MHz. The Tx pulse is fed to a VSG via cables. The VSG first splits the Tx into two channels and then introduces a predefined set of delays in the Tx pulse to simulate the radar echoes for two Rxs. The Rx signals are down-converted and passed through two LPFs that have cutoff frequencies at 1 MHz and 100 kHz, respectively. Then the signals from the output of the filters are sampled at the Nyquist rate, 2 MHz, and sub-Nyquist rate of 200 kHz. Once the digital samples are available, we apply an alternate minimization algorithm (cf. Algorithm 1 in [1]) to estimate the range and amplitude of the targets.
Results
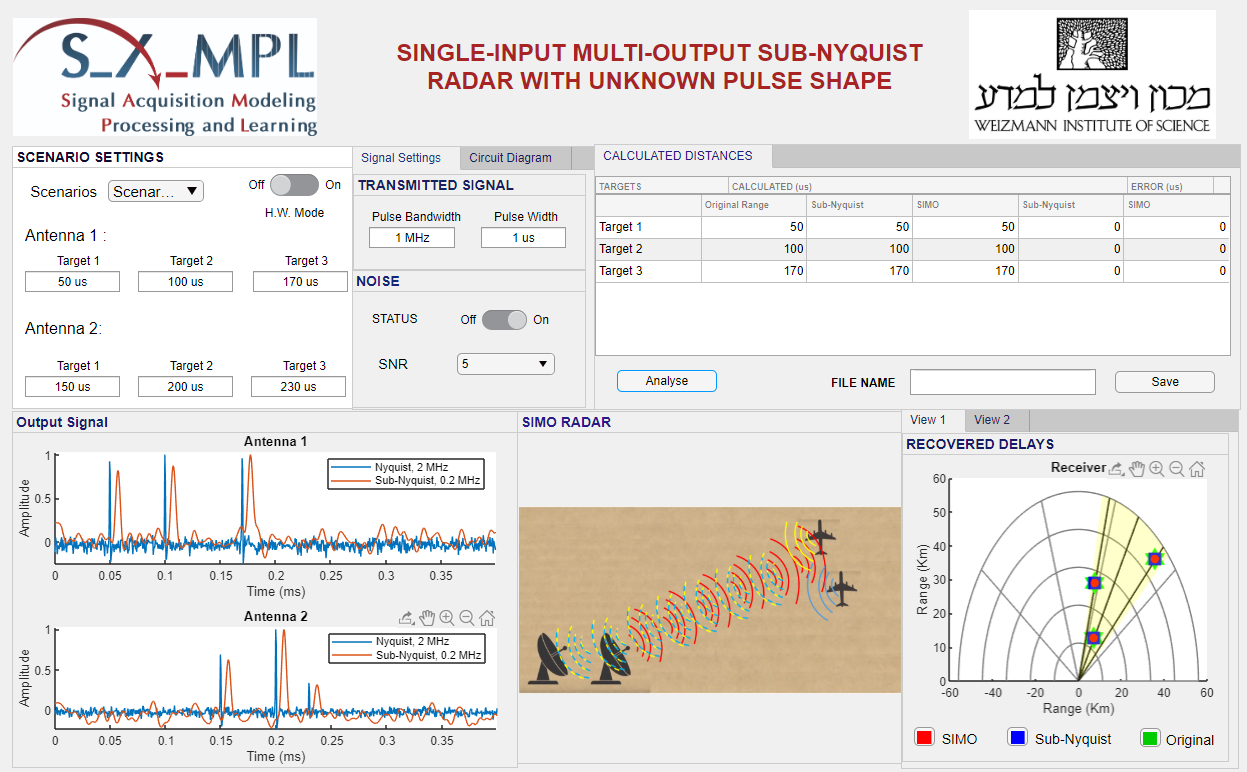
The results are discussed through a graphical user interface (GUI) built for the demo. A screenshot of the graphical processing unit is shown above where we show the signals received at the Nyquist and sub-Nyquist rates, locations of the targets with respect to each antenna element, and estimated target locations. The transmit pulse has a bandwidth of 1 MHz. At the receiver, when the signal is passed through a Nyquist filter with a cutoff frequency of 1 MHZ, its shape will not change. However, filtering through a sub-Nyquist filter with a cutoff frequency of 100 kHz results in spreading of the received echoes. The spreading of the pulses also creates a misinterpretation that the Nyquist and sub-Nyquist channels have a relative delay. We observe that the performance of the proposed single-input multi-output approach is comparable to that of the sub-Nyquist radar. Both the radars operate at 10 times below the Nyquist rate.
for more Green Data Acquisition: https://www.weizmann.ac.il/math/yonina/green-data-acquisition
References
- S. Mulleti, Y. Shavit, M. Namer, and Y. C. Eldar, "A Hardware Prototype of Sub-Nyquist Radar with Distorted Pulse Shape", IEEE Radar Conference (RadarConf), September 2020.
- S. Mulleti, K. Lee, and Y. C. Eldar, "Identifiability conditions for compressive multichannel blind deconvolution", IEEE Transactions on Signal Processing, vol. 68, pp. 4627-4642, July 2020.
- S. Mulleti, K. Lee, and Y. C. Eldar, "Sub-Nyquist Multichannel Blind Deconvolution", IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Virtual, June 2021.
Videos