
Encoding of Active Touch
Encoding of Location
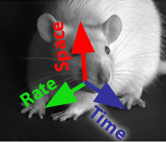
We found that the most efficient neural code for each of the three spatial dimensions is different: temporal for the horizontal axis (along whisker rows), spatial for the vertical (along whisker arcs) and rate for the radial axis (from the face out).
Behavior

However, rats initially trained with multiple whiskers typically improved their performance when re-tested later with a single whisker intact on each cheek. In general, lower thresholds were obtained with fewer intact whiskers, and the lowest thresholds were significantly less than the typical inter-vibrissal spacing. Rats typically whisked when performing this task, and performance dropped to chance level when whisking was prevented by cutting the facial motor nerve.
Furthermore, performance levels for all whisker-array configurations tested, except that of a single pair of whiskers from onset of training, correlated positively with the net whisking spectral power at 5-25 Hz. From these experiments, we conclude that object localization in the rat vibrissal system is an active process: whisker movements are both required and beneficiary, in a graded fashion, for making accurate positional judgments.
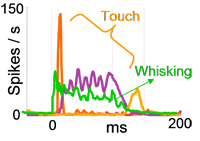
On-going computation of whisking phase by mechanoreceptors
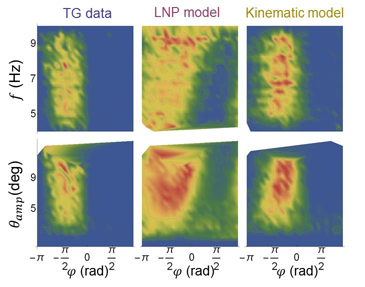
Using a novel closed-loop interface in anesthetized rats, we found that whisking phase is encoded in a frequency- and amplitude- invariant manner already by primary vibrissal afferents. We show that for naturally-constrained whisking dynamics, such invariant phase coding can be obtained by tuning each receptor to a restricted kinematic sub-space.
We then show that invariant phase coding is preserved in the brainstem, where paralemniscal neurons filter out the slowly evolving offset while lemniscal neurons preserve it. These results demonstrate an accurate perceptually-relevant mechanically-based processing at the sensor level.
Relevant papers
-
 (2003). Encoding of vibrissal active touch. Neuron. 40:621-630.
(2003). Encoding of vibrissal active touch. Neuron. 40:621-630. -
(2005). Tracking whisker and head movements in unrestrained behaving rodents. Journal Of Neurophysiology. 93:2294-2301.
-
(2006). Active sensation: insights from the rodent vibrissa sensorimotor system. Current Opinion In Neurobiology. 16:435-444.
-
(2006). Haptic object localization in the vibrissal system: Behavior and performance. Journal Of Neuroscience. 26:8451-8464.
-
(2006). Responses of trigeminal ganglion neurons to the radial distance of contact during active vibrissal touch. Journal Of Neurophysiology. 95:791-802.
-
(2008). Object localization with whiskers. Biological Cybernetics. 98:449-458. (Review)
-
(2008). 'Where' and 'what' in the whisker sensorimotor system. Nature Reviews Neuroscience. 9:601-612.
-
(2009). Orthogonal coding of object location. Trends In Neurosciences. 32:101-109. (Review)
-
(2016). On-Going Computation Of Whisking Phase By Mechanoreceptors. NATURE NEUROSCIENCE. 19:487-+.